MC4N-RTEX. It is dedicated to running remote servo drives via Panasonic’s RTEX Real Time EXpress automation bus. It is based on an up-rated version of the 532MHz ARM processor with VFP3 and is available with configurations from 2 to 32 axes making it ideal for high axis count machines or robotic applications.
The MC4N-RTEX supports up to 32 axes of motion with 64 bit integer position registers for ultra precise axis resolution. RTEX slave drives can be connected and run in cyclic synchronous position, speed or torque modes provided these are supported by the drive.
Highlights
- Up to 32 RTEX Digital Drive Axes
- Supports Position, Speed and Torque Drive Modes
- Up to 1024 I/O
- Linear, Circular, Helical and Spherical Interpolation
- Flexible CAM shapes, Linked Motion
- Isolated Encoder Port
- Biss, EnDAT and SSI Absolute Encoder Supported
- Hardware Linked Output for Camera / Laser Control
- Ethernet-IP / Modbus TCP / Trio ActiveX / Uniplay HMI / UDP / Ethernet Interface Built-In
- Precise 64Bit Motion Calculations with 532MHz ARM 11 Processor
- IEC 61131-3 Programming
- Multi-tasking BASIC Programming
- Text File Handling
- Robotic Transformations
- 4 high speed registration inputs
- Isolated RS232 and RS485 ports
- SD Memory Card Slot
- CANopen I/O Expansion
- Backlit LCD Display
- RoHS and CE Approved

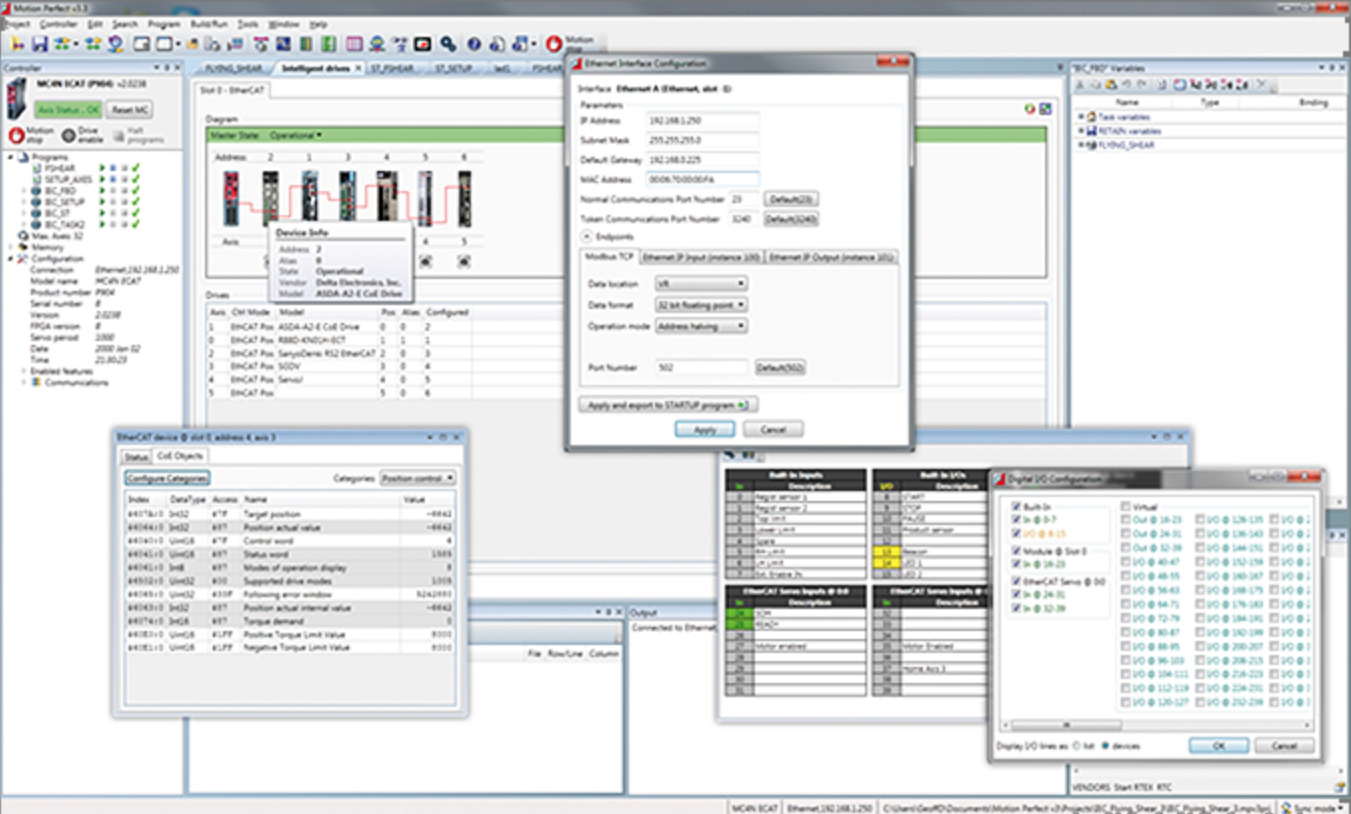
Programming the MC4N is identical to using traditional analogue axes with the addition of being able to set up drives and process alarms over the RTEX bus. With everything programmed from one place, machine control has never been so simple. Connecting to Panasonic drives is made easy with Motion Perfect’s Intelligent Drives window.
Options
Versions of the MC4N-RTEX are available for 2, 4, 8, 16 and 32 motor axes. All versions feature 32 software axes any of which may be used as virtual axes if not assigned to RTEX hardware. Every axis can be programmed to move using linear, circular or helical or spherical interpolation, electronic cams, linked axes and gearboxes. The power of the controller allows for multiple robotic transformations to run simultaneously.
I/O can be connected via the CAN port on top the MC4N making expansion quick and easy.